
|
|
||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||
|
Elektronik |
Schalter & Servo |
|||||||||||||||||||||||||||||||
|
Beier SFR-1D (zwei Motortreiber) Beier SFR-1 (ein Motortreiber) |
Beier USM-RC-2 Beier USM-RC-3 Neuhaus |
Speedstar Micro RS 131 Quicrun 1060 Beier MFR 1210 Ansmann Micro Boot Ruizhi Micro Regler |
Schalter & Servo |
Waffenstabilisierung Graupner Lipo Safer Lautsprecher Rauchmodule |
||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||
|
Die Anschlusskabel des Schalters Graupner SXH. |
||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||
| Das Anschlußschema des Schalters Graupner SXH. |
||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||
|
Das Anschlußbild des Schalters Graupner SXH. |
||||||||||||||||||||||||||||||||
|
Technische Daten Schaltfunktionen: Ein / Aus (speichernd) Max. Empfängerspannung: 8,5V Max. schaltbare Spannung: 21,5V Max. Strom: 16A Gewicht: ca. 8g |
||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||
| Anleitung (PDF) | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 1/2. Um einen Servo egal welcher Baugröße in eine reinen Getriebemotor zu verwandeln muss die ganze Regelelektronik entfernt werden. | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
|
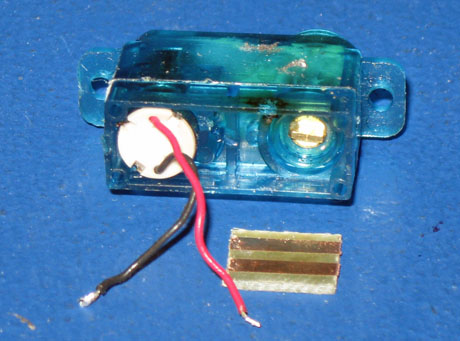
3. Ein Stück Epoxydharz-Platine dient als Kabelverbindung. |
4. Alles wieder zurück ins Gehäuse. |
|||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
|
5/6. Deckel drauf und fertig ist ein Getriebemotor mit Gehäuse und Montagehalterung. Einfacher gehts nicht. |
||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 1/2. Dieser Micro-Servo ist die Grundlage für einen regelbaren Geschützturmantrieb bei Kriegsschiffen im Maßstab 1:350. | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 3. Der Servo besteht aus drei Teilbereichen, Deckel, Mitte und Boden. | 4. Im Boden findet man die Elektronik. | |||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 5. Mit der Elektronik beginne ich. | 6. Der Podi wird wegen seiner Achse für die Zahnräder benötigt. | |||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 7. Der Podi hat einen Widerstand von 1671 Ohm. | 8. Die geeignete Baugröße der SMD-Widerstände ist 0805. | |||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 9. Zwei Widerstände mit je 820 Ohm ergeben zusammen 1640 Ohm. | 10. Diese 1640 Ohm entsprechen in etwa dem Widerstand des Podis. | |||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 11/12. Die Widerstände werden an der Platine zwischen den Lötpunkten der drei entfernten Podikabel eingelötet. | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 13. Die Platine zurück in den Boden und Deckel drauf. | 14. Eines der Getriebezahnräder hat einen Anschlag. | |||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
| 15/16. Dieses Zahnrad muss ausgebaut werden und der Anschlag entfernt werden. Links mit Anschlag, rechts ohne Anschlag. | ||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||
|
17/18. Der Sender eine Taranis X9E, mit der Software des Sender kann jeder Servo idividuell programmiert und dadurch angepasst werden. |
||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||
