
|
|
||||||||||||||||||||||
|
Elektronik Leopard 2-A6 "Helmut" 1:16 RC-Modell |
|||||||||||||||||||||||||||||||||||||||||||||||
|
Die Elektronik in allen von mir gebauten RC-Panzer teilt sich in zwei Bereiche: Erster Bereich ist die stationäre (eingebaut) Elektronik. Zweiter Bereich ist die flexible (einfach zu entfernen) Elektronik.
Besonderheiten Der Leo hat zwei Empfänger die von einem Sender gesteuert werden. Der Grund für diese etwas aufwendigere Konzeption ist das Ziel die Wanne möglichst zu 99% Wasserdicht zu bekommen. Empfänger eins ist in der Wanne im Steuermodul B-2 als S-Bus mit 16 Kanälen verbaut. Er steuert die Wanne und den Sound. Empfänger zwei ist im Turm fest eingebaut als analoger 6 Kanal. Der nur die Turmfunktionen steuert. Wie das Original hat das Modell eine Waffenstabilisierung, bei Bau der Turmtechnik wurde allerdings berücksichtig das der Turm auch ohne das Waffenstabilisierungs-Modul funktionstüchtig ist.
Der wichtigste Aspekt hierbei ist, das alle meine RC-Panzer bis zur Wannenoberkante Wassergeeignet sind. Bedeutet nicht nur fahren sondern auch stehen bleiben im Wasser bis der Panzer eventuell vollgelaufen ist, ohne das an der elektrischen Ausstattung ein Schaden entsteht.
Der Nebeneffekt hiervon ist die Kostenersparniss, die ich wiederum in den Antrieb (Getriebe & Motoren) investiert habe.
Das Wesen eines Panzers (Kettenfahrzeug) besteht in seiner Geländegänigkeit, sonst hätte er Räder. Diese Geländegänigkeit hat den Nachteil eines hohen Energieverbrauches was hauptsächlich an der Auslegung des Laufwerkes liegt. Kettenbetriebene Fahrzeuge haben durch ihre über das ganze Laufwerk bedingte Auflagefläche zum Untergrund eine maximale Traktion was einen maximalen Rollwiderstandzur Folge hat. Um diesen Rollwiderstand möglichst optimal zu überwinden muß ein möglichst starker Motor sowie ein geeignetes Getriebe eingebaut werden.
Weitere Gesichtspunkte sind: Standfestigkeit, Robustheit, Kühlung, und sowieso die Geräuschentwicklung im Panzer speziell durch das Getriebe. Die günstigen (70.-) Getriebeeinheiten die zur Zeit (2018) auf dem Markt sind erzeugen soviel Lärm das man das Soundmodul gleich weglassen kann, abgesehen davon ist die Konstruktion mangelhaft was eine völlig unzureichende Einsatzdauer zur Folge hat. Das Argument das die Originale im WK-II auch nicht besonders weit (max. 1500 km) kamen ist mir zu billig, denn die wurden schon für relativ kurze Strecken auf die Bahn verladen und zwar nicht vorrangig wegen des Verbrauches an Benzin (im Gelände bis zu 700 L/100 km) sondern wegen der Anfälligkeit des gesamten Antriebes. Ich möchte mein Modell fahren und nicht verladen. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
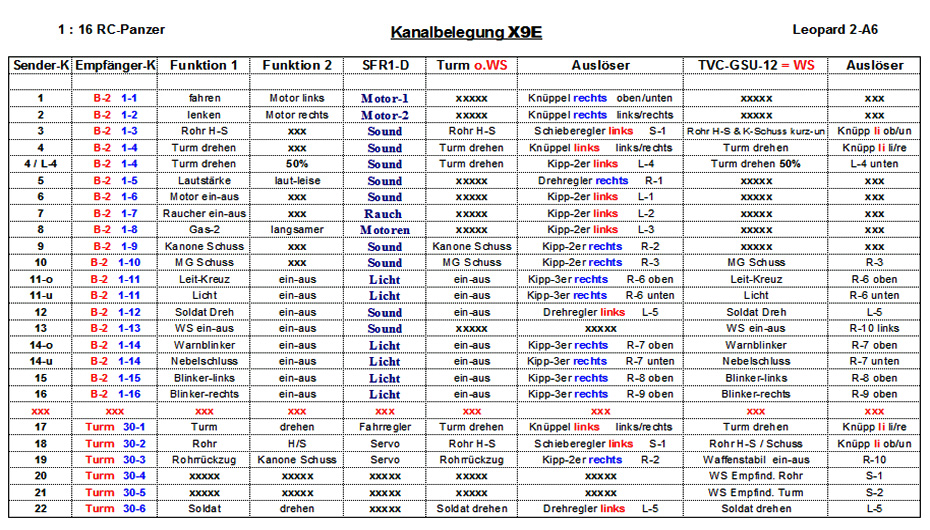
| 1. Diese Tabelle zeigt alle Funktionen des Modells. B-2 ist der Soundfahrregler, 1-1 bis 1-16 Empfänger eins, 30-1 bis 30-6 Empfänger zwei. | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
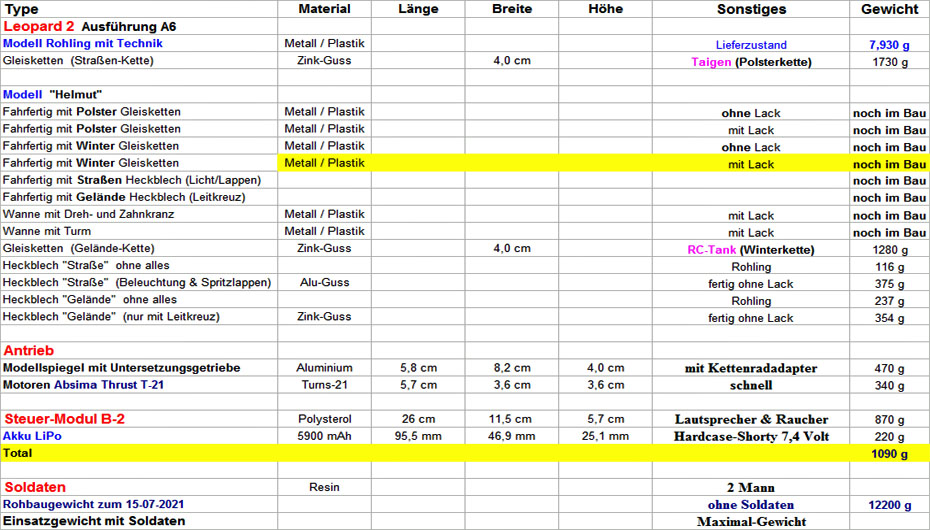
| 2. Übersicht der wichtigsten Gewichtesbereiche, der eingebauten Ausrüstung und verbautem Material. | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
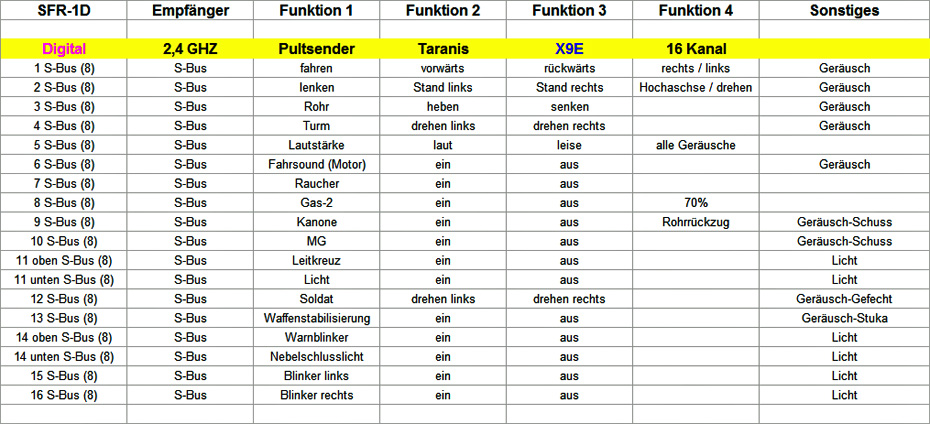
| 3. In der gelb markierten Zeile ist der Sender angegeben mit dem die aufgeführten Funktionen ausgelöst werden. Detaills >>Hier<< | |||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | |||||||||||||||||||||||||||||||||||||||||||||||
Steuermodul B-2 |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
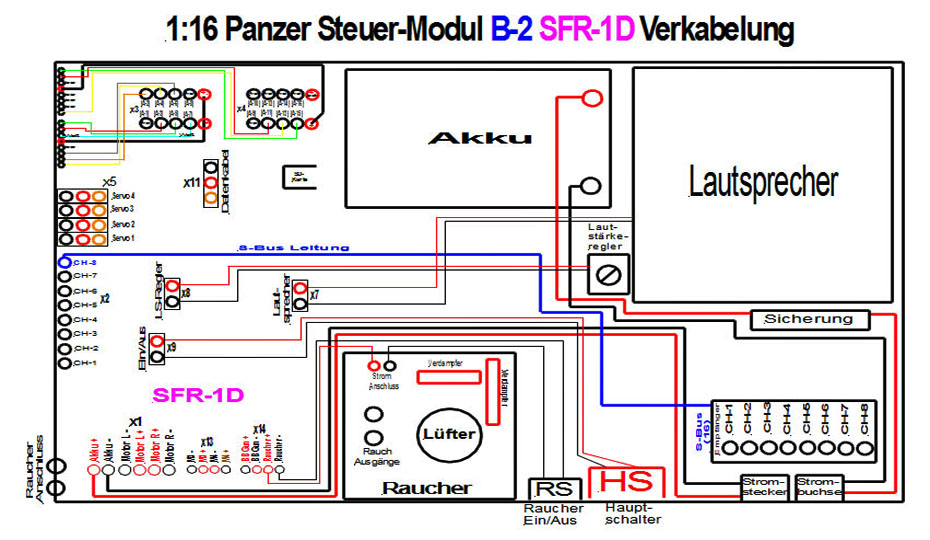
| 4. Das Modul enthält alles ausser dem Getriebeblock um einen Panzer zu steuern. Detaills >>Hier<< Leopard-2. | |||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
||||||||||||||||||||||||||||||||||||||||||||||
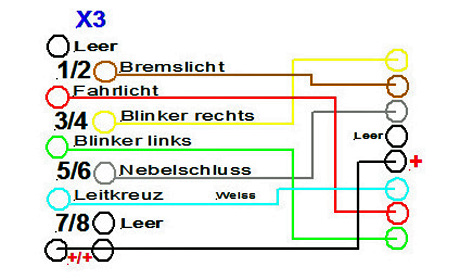
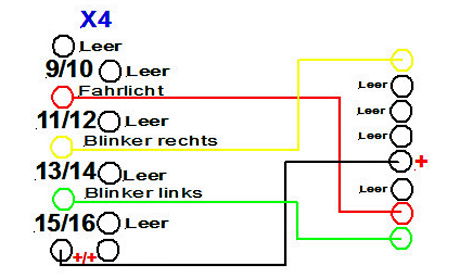
| 5. Die Ausgänge X3/X4 von SFR-1D sind frei belegbar, beim Leo wird damit die gesamte Beleuchtung geregelt. Detaills >>Hier<< | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
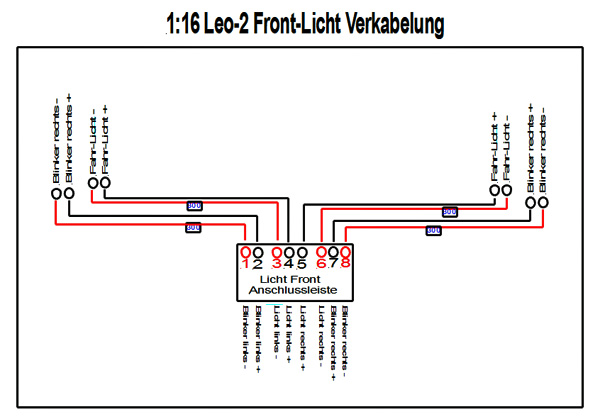
| 6. Anschlussplan der Frontbeleuchtung. | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
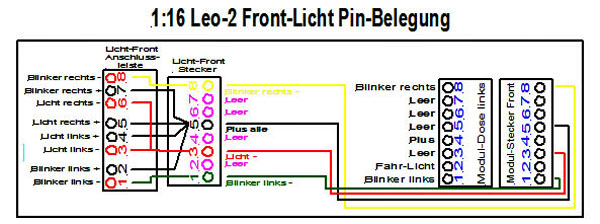
| 7. Pin-Belegung der Frontbeleuchtung und dem Verbindungskabel zum Doppelsoundfahrregler Beier SFR-1D. | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
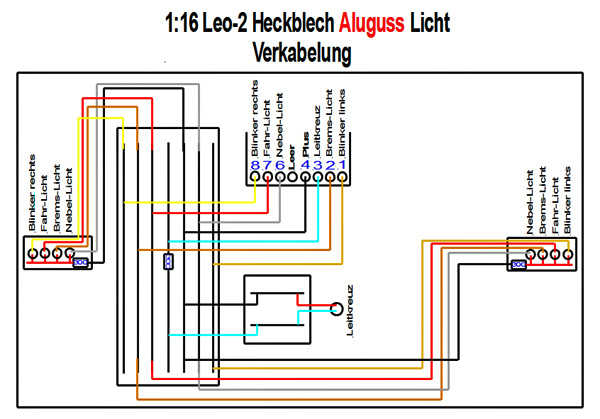
8. Anschlussplan der Heckbeleuchtung "Straße". |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
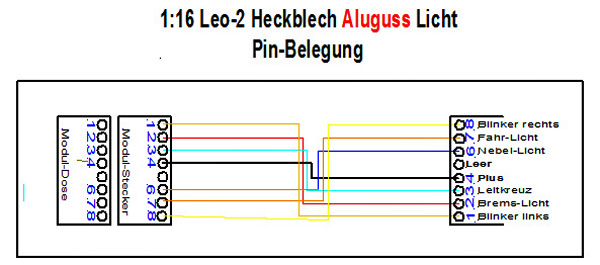
9. Pin-Belegung der Heckbeleuchtung "Straße" und dem Verbindungskabel zum Doppelsoundfahrregler Beier SFR-1D. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
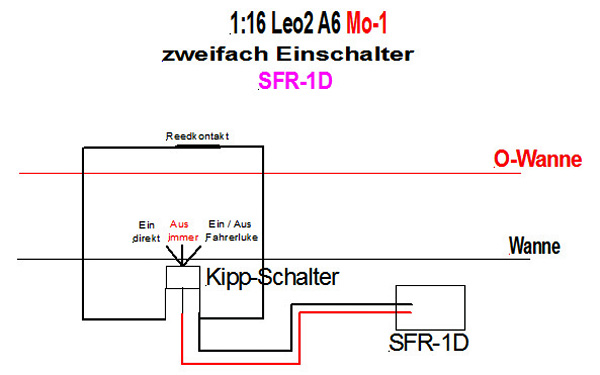
10. Anschlussplan des Hauptschalters für die Wanne. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
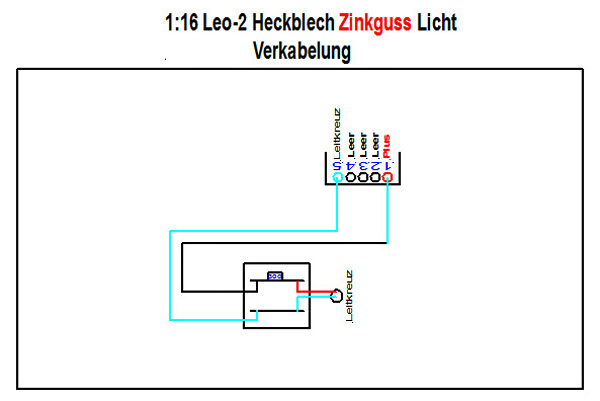
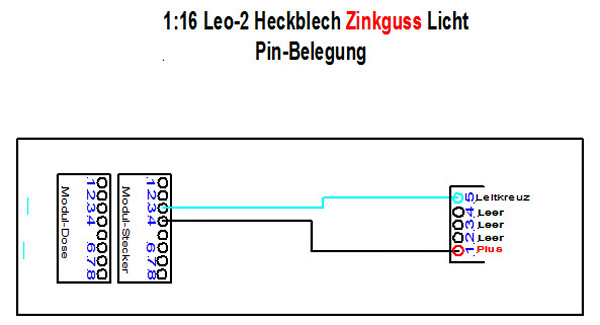
11. Anschlussplan der Heckbeleuchtung "Gelände". |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
12. Pin-Belegung der Heckbeleuchtung "Gelände" und dem Verbindungskabel zum Doppelsoundfahrregler Beier SFR-1D. |
|||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
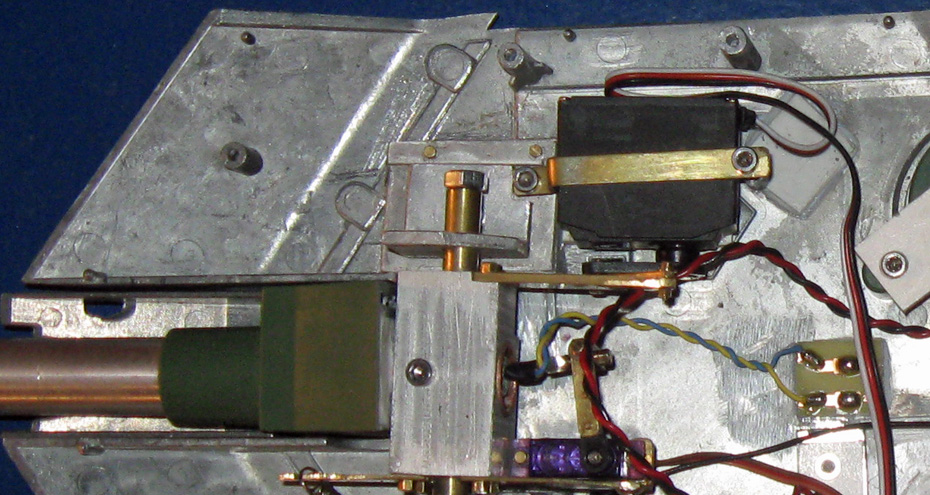
13. In diesem Bereich des Turms ändert sich nichts, egal ob der Turm mit oder ohne Waffenstabilisierung ausgerüstet ist. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
|
14. Von unten nach oben nach rechts: Der Rohrrückzugsservo, Hebe-Senkservo und die Anschlussplatine der Schussblitz-LED. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
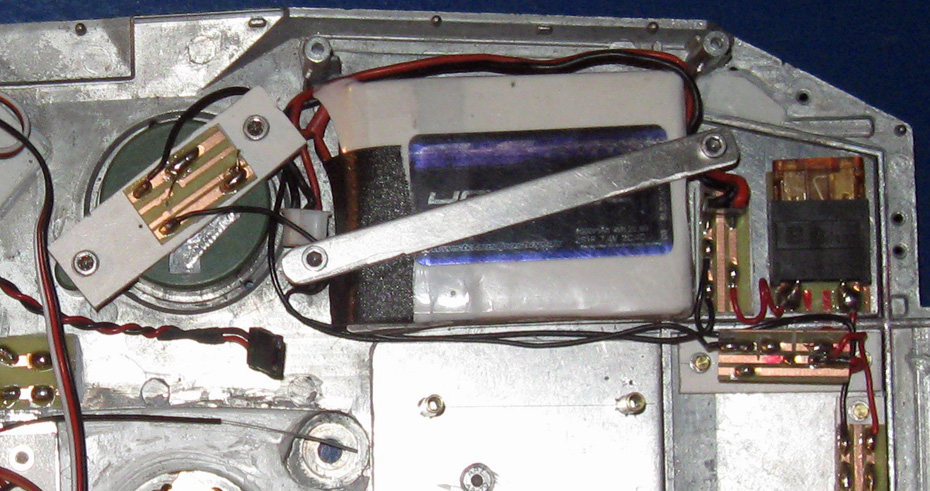
| 15. Von links nach rechts: Der Hauptschalter des Turmes, Akku mit Anschlussplatine, Sicherung und Adapterplatine der Stromversorgung. |
|||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
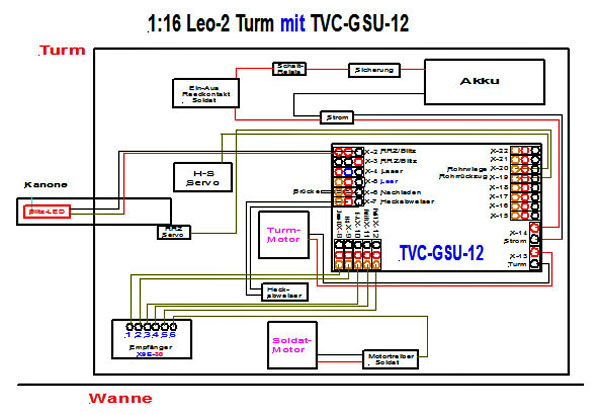
| 16. Verkabelung und Pin-Belegung des Turmes mit Waffenstabilisierung. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
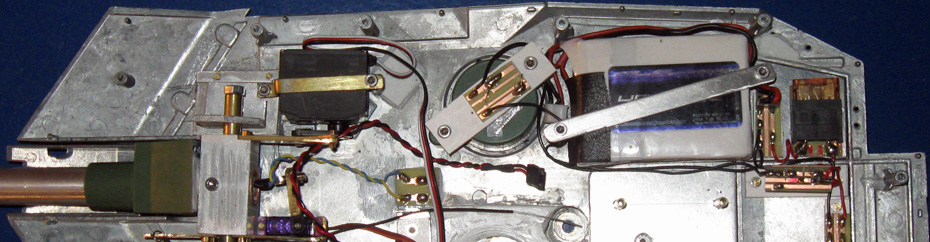
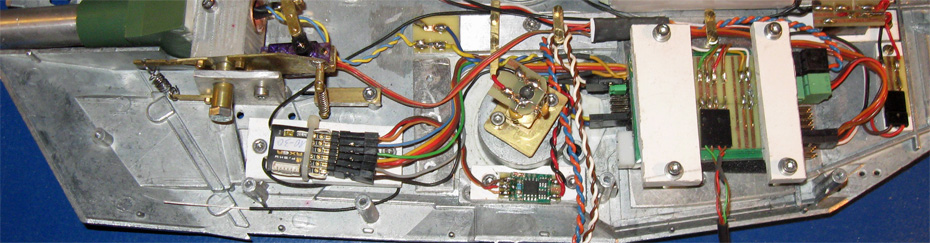
17. Dieser Bereich des Turmes zeigt wie der Turm gesteuert wird, hier mit der Waffenstabilisierung. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
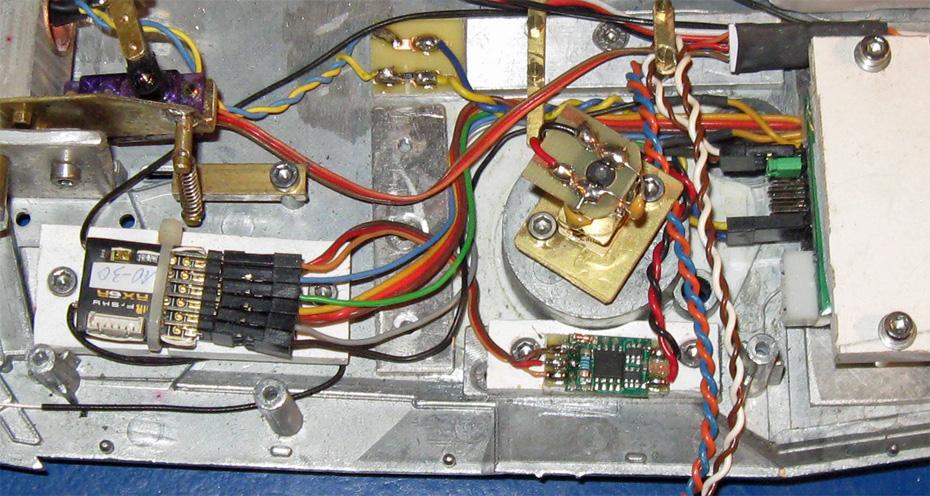
18. Von links: Der Empfänger des Turmes, Soldatendrehmotor unterhalb der Regler und das Waffenstabilisierungs-Modul. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
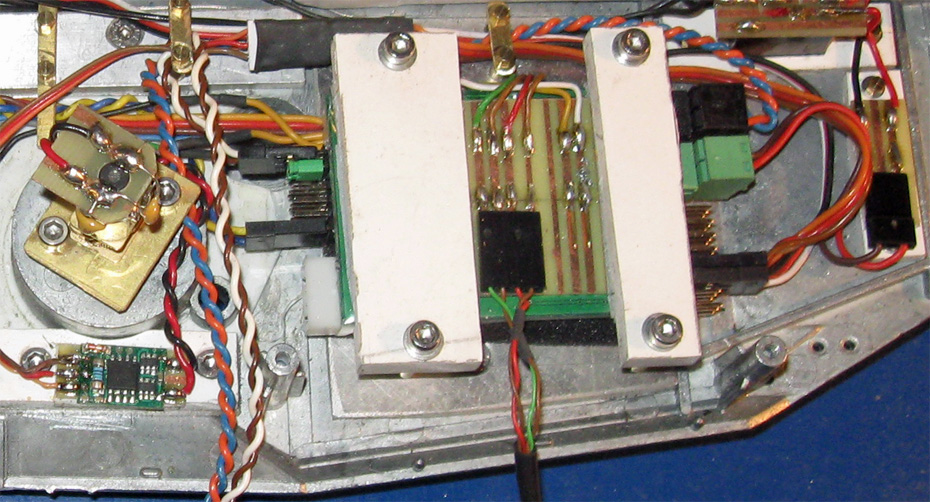
19. Von links: Soldatendrehmotor unterhalb der Regler, die Waffenstabilisierung und ganz rechts die Schnittstelle des Stromanschlusses. |
|||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | |||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
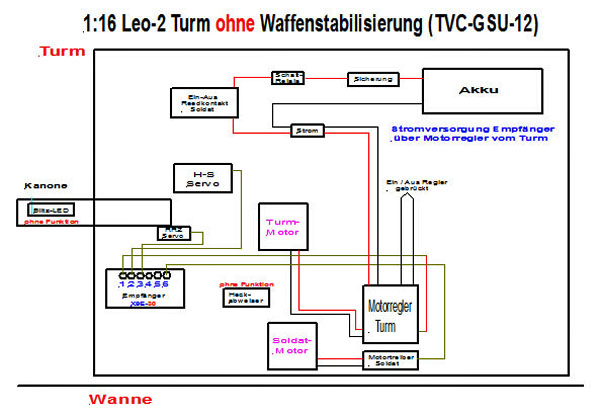
| 20. Verkabelung und Pin-Belegung des Turmes ohne Waffenstabilisierung. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
| 21. Dieser Bereich des Turmes zeigt wie der Turm gesteuert wird, hier ohne Waffenstabilisierung. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
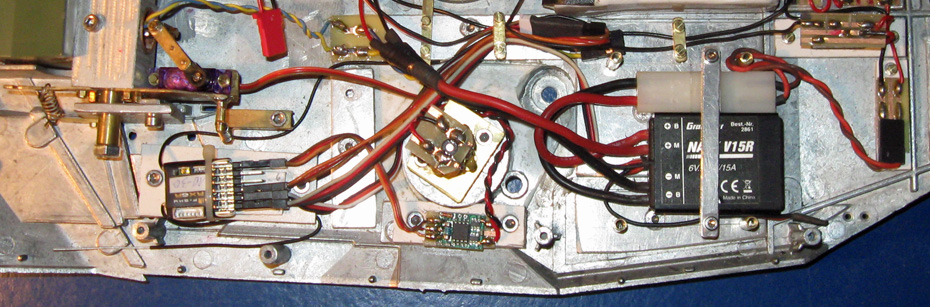
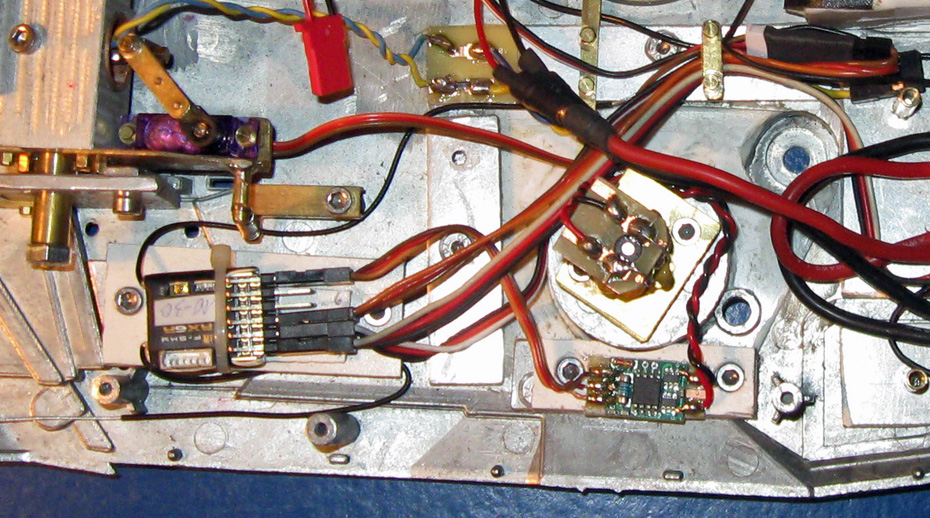
22. Von links: Der Empfänger des Turmes, Soldatendrehmotor unterhalb der Regler und die Kabel desTurmreglers. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
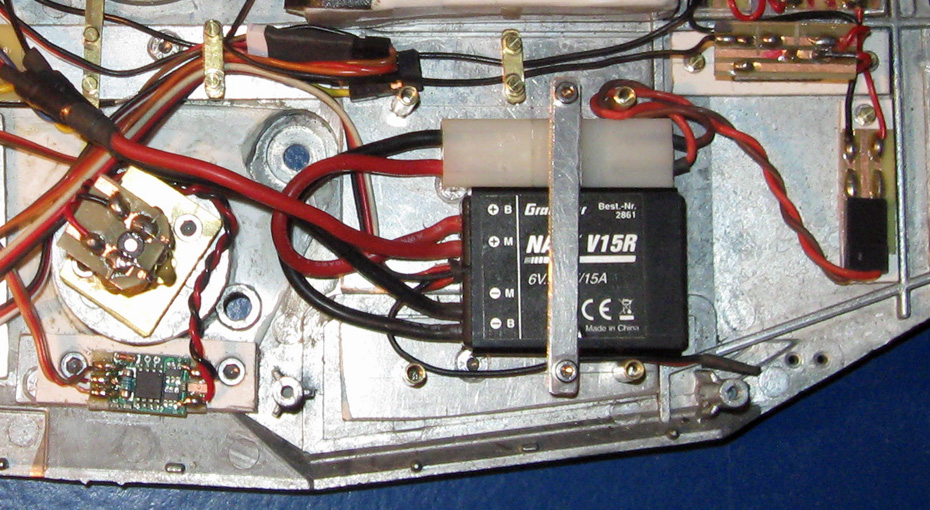
23. Von links: Soldatendrehmotor unterhalb der Regler, der Regler des Turmdrehmotors und rechts die Schnittstelle des Stromanschlusses. |
|||||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
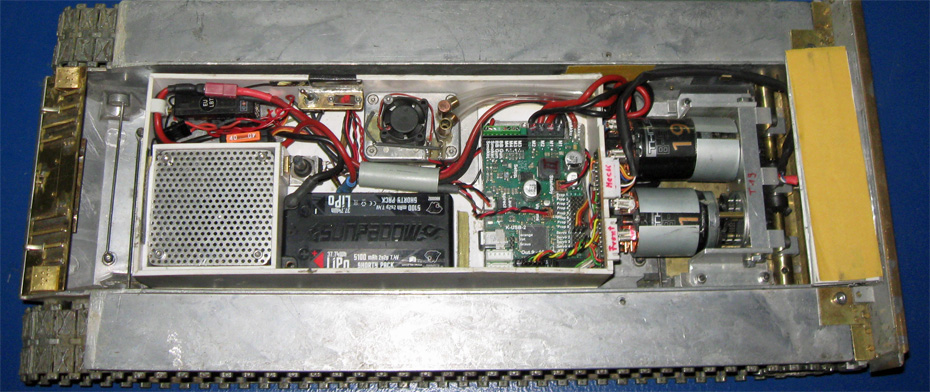
24. Die offene Wanne des Leo´s mit dem Steuermodul B-2 und das Getriebe mit T-19 Motoren. |
|||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | |||||||||||||||||||||||||||||||||||||||||||||||
| zur Übersicht Leopard-2A6 | |||||||||||||||||||||||||||||||||||||||||||||||