|
|
||||||||||||||||||||||
|
1:16 RC - Panzer Waffenstabilisierung Zielfixierung bei Fahrt |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die Steuereinheit |
Einbau Leopard 2A6 - Materialliste Leopard 2A6 - Turmmotor Leopard 2A6 - Anschluss Leopard 2A6 - Anschlussplan |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Waffenstabilisierunmg - Warum Beim Original ist so ein System eingebaut. Die Möglichkeit den Turm total von der Wanne zu trennen, ist nur möglich wenn zwei Empfänger eingesetzt werden. Entstehungsgeschichte Der Ursprungsgedanke war das treffsichere Schießen mit der Kanone während der Panzer fährt. |
||||||||||||||||||||||||||||||||||||||||||||||||||
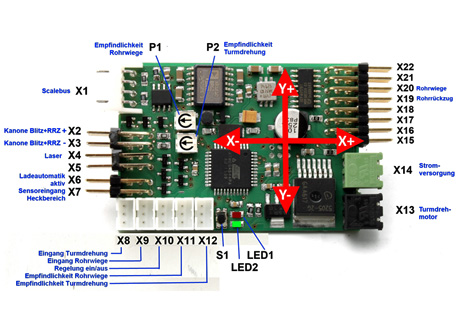
Anschluss Übersicht |
||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
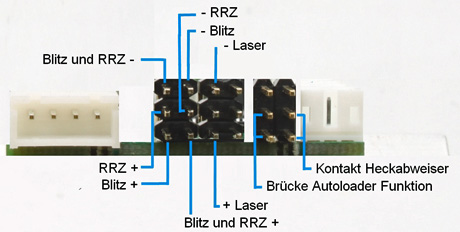
Anschluss links |
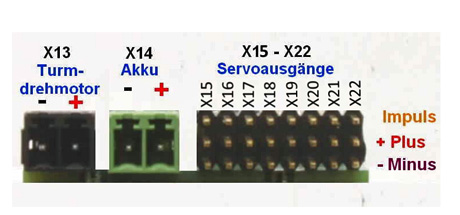
Anschluss rechts |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
Theorie und Praxis Im Lieferzustand ist das Modul nicht präzise zu programmieren, die Beschreibung ist absolut praxisfern. Hinzu kam noch ein elektronischer Defekt das mir 3 Tage Fehlersuche einbrachte. Die Reperatur wurde übernommen allerdings ohne Portoerstattung. Umbau Meine besondere Einbaulage machte den Umbau unabdingbar. Alle elektronischen Geräte bzw. Bauteile reagieren auf Wasser sehr allergisch, darum habe ich alles was ging am Turmdach befestigt. Das Modul kann in fast allen Lagen eingebaut werden, aber nicht über Kopf, man kann dann die LED nicht mehr sehen und den Knopf nicht drücken.. 1. Entweder eine Lösung finden oder den Leo ohne TVC-GSU-12 bauen, darum gibt es auch eine Turmvariante ohne Stabilisierung. >> ohne WS<< 2. Der Preis ist für die elektronische Ausstattung des Moduls ok, aber um das Modul durch ein paar Wassertropfen zu zerstören ist es einfach zu teuer. 3. Die Lösung hat jetzt gleich zwei Vorteile: a / programmierbar in komplett eingebautem Zustand, b / Statusanzeige sichbar im fertigen Modell. 4. Detaillierte Einstellungen in Verbindung mit einer Taranis X9E finden sie >>hier<<. Zukunft 5. Der einfachste Weg währe allerdings das Modul seiner Zeit anzupassen und eine Schnittstelle zu verbauen, sowie die passende Software zu entwickeln. 6. Der Hinweis in der Betriebsanleitung: "Zum Einbau des Moduls braucht es gute Kenntnisse im Funktionsmodellbau", könnte entfallen. 7. Digital Einstellmöglichkeiten für den Turmmotor und der anderen Komponenten würden die Sache erheblich erleichtern und das Modul für fast jeden einsetzbar machen.
8. Speziell das finden des richtigen Turmantriebs (Getriebe/Motor) damit der Turm beim drehen auf der Hochachse (Stelle) mit der Wanne synchron ist und sich im Gelände nicht dauernd selbstständigt (Eigenträgheit) macht ist eine wahre Herausforderung.
9. Wenn der Turmmotor über eine Software regelbar währe könnte man auch verschiedene Einstellungen speichern und über einen Hochwertigen Sender im Betrieb abrufen ohne das Modul jedesmal über die "Blickerei" neu auf die veränderten Bedingungen einzustellen. |
||||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| 1. Lieferzustand, unten neben den Steckplätzen der Taster und die LED. | 2. An den Taster und an jede LED jeweils zwei Kabel anlöten. | |||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
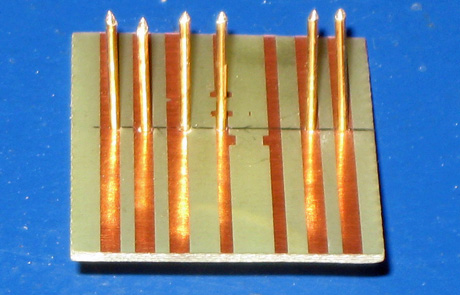
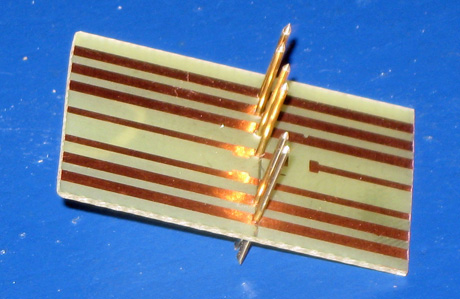
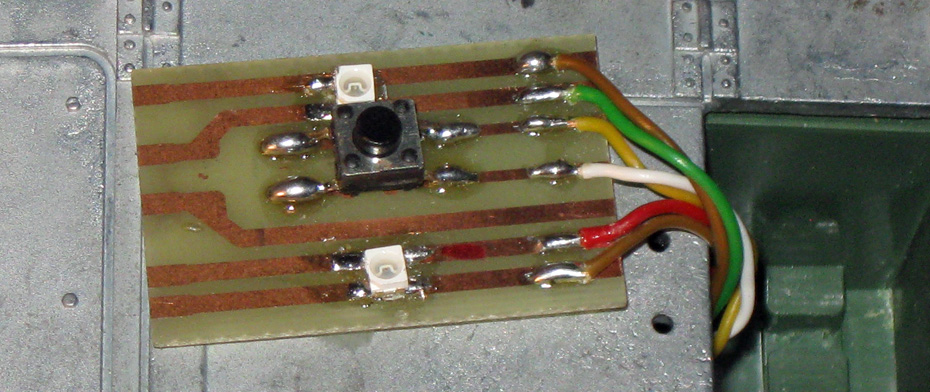
| 3. Die "Adapterplatine", benötigt werden 5 Bahnen. | 4. Die Messingstifte sind 0,8mm Stark und ca. 1,5cm lang. | |||||||||||||||||||||||||||||||||||||||||||||||||
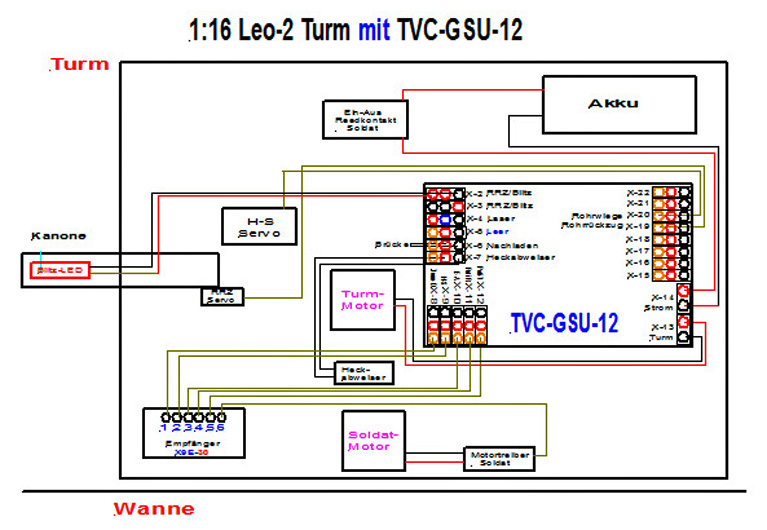
 |
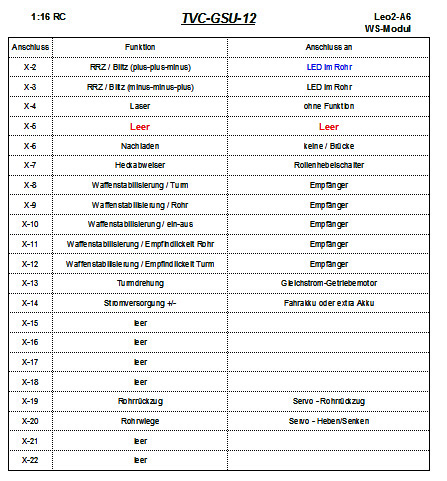
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
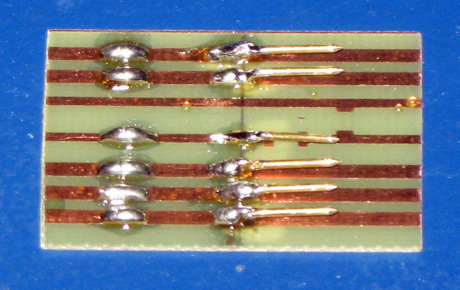
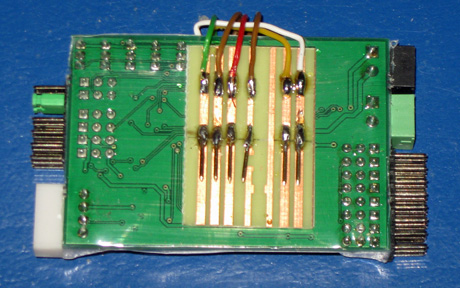
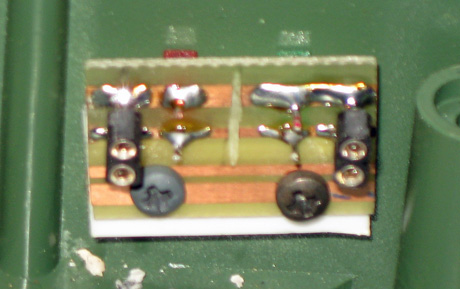
| 5. Links die Lötstellen für die Kabel, rechts die Steckplätze. | 6. Die mit Doppelklebeband am Modul befestigte "Adapterplatine". | |||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
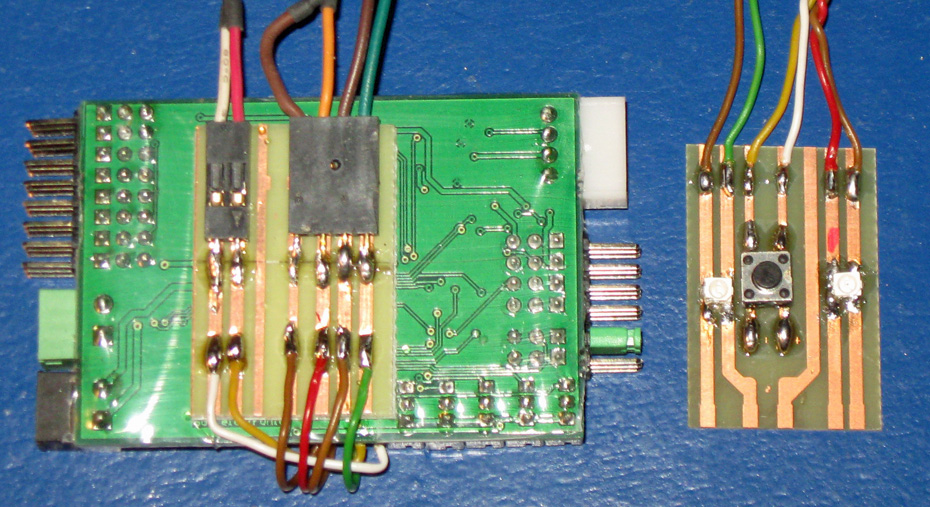
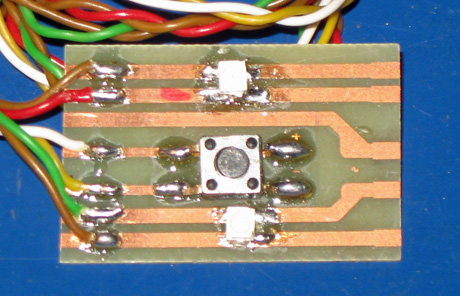
| 7. Der linke Stecker ist der Tasteranschluss, der Rechte für die rote und grüne LED. Links die externe Platine mit Taster und den LED´s. | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
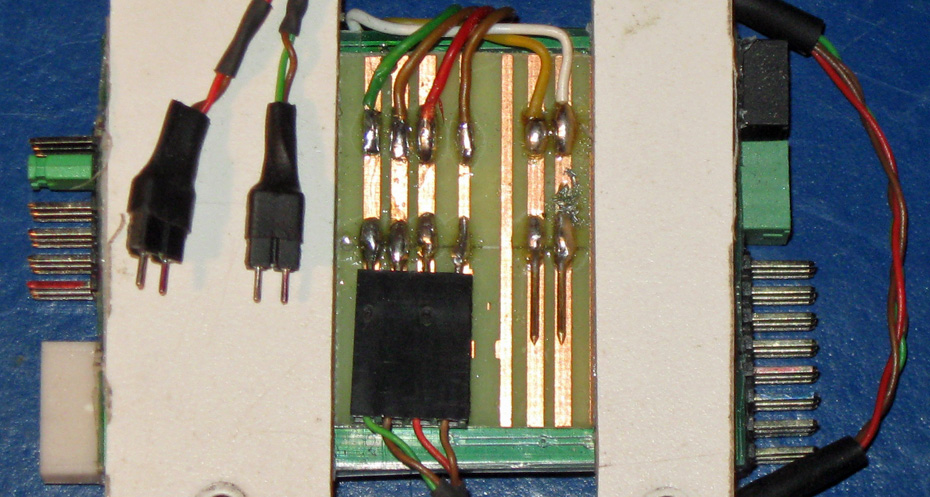
| 8. Die Halter aus 5mm Polysertol werden mit Doppelklebeband an der Rückseite des Modul´s befestigt. | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
| 9. Am LED-Steckplatz kann auch ein Adapterkabel zum Anschluss der externen Status-LED´s eingesteckt werden. | ||||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
10. Die Programmierplatine. |
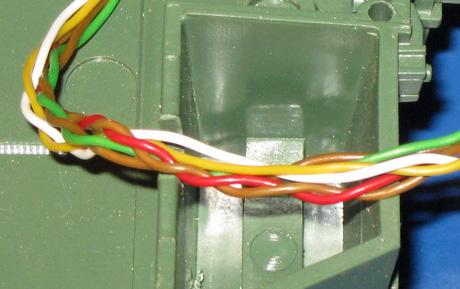
11. Die Aussparung in der Turmrückwand für die Kabel. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
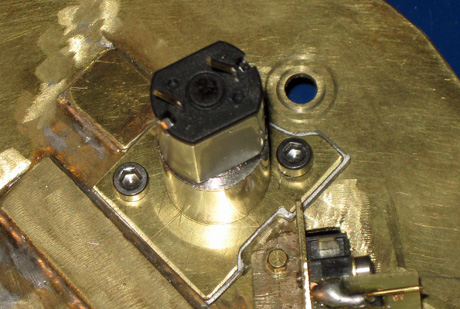
12. Die angeschlossene Programmierplatine auf dem Turmdach, so ist das Abarbeiten der individuellen Einstellungen kein Problem. |
||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
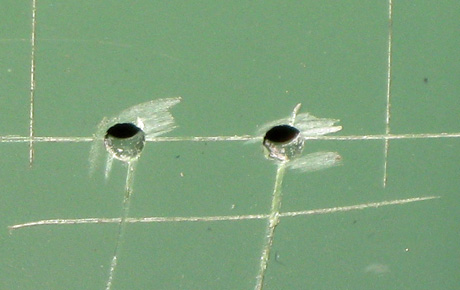
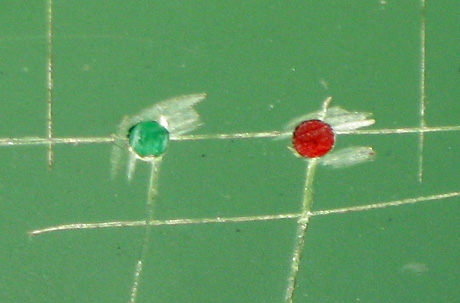
13. Diese zwei Löcher in der Turmseitenwand sind für die LED´s. |
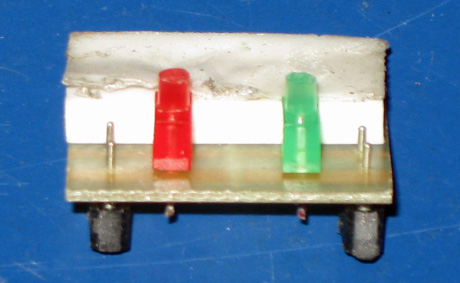
14. Die LED´s sowie zwei Anschlüsse für die Stecker. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
15. Die kleine Platine verschraubt an der Turminnenseite. |
16. Die LED sind hinter einem "Turmflügel" versteckt. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
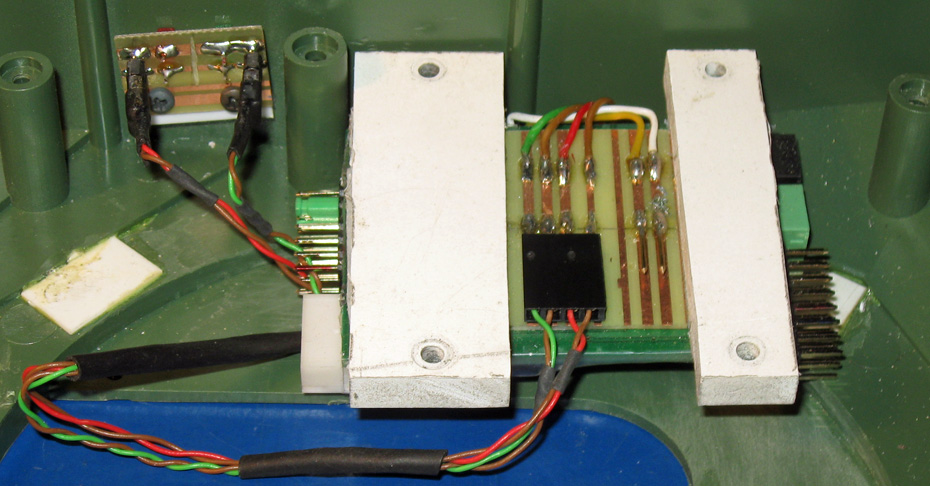
17. Das Ganze zum besseren Verständniss von innen gesehen. Eine Überprüfung des Moduls ist so in eingebautem Zustand möglich. |
||||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
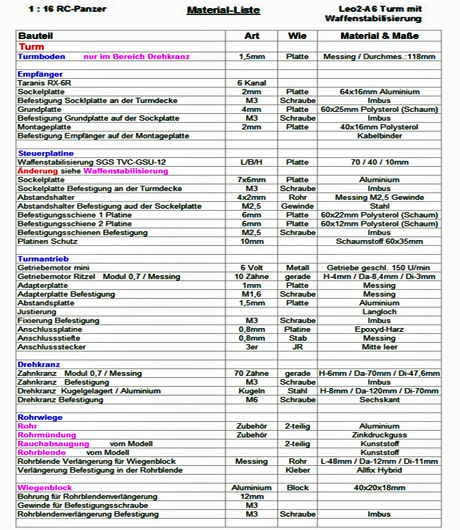
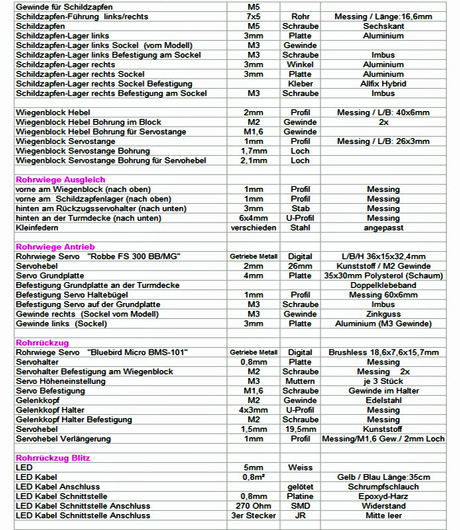
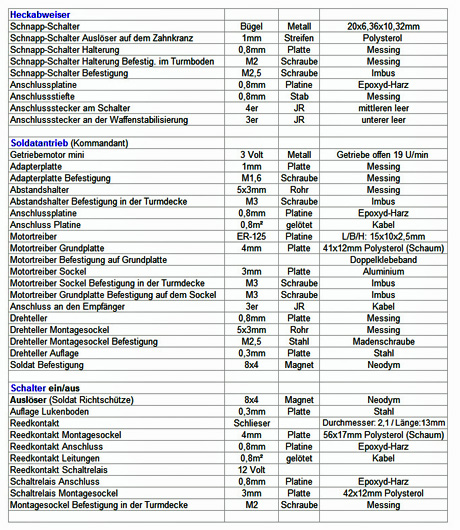
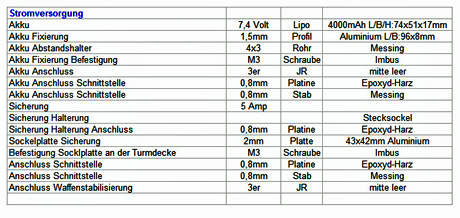
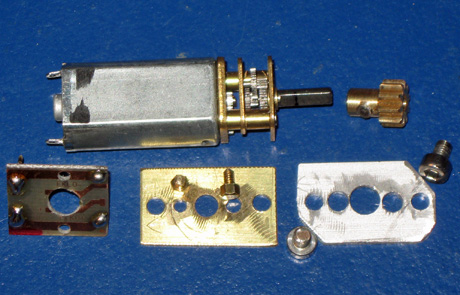
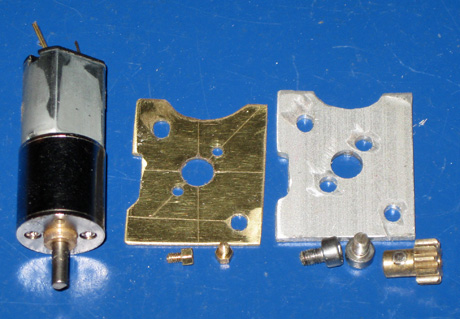
| 18. Die Angaben enthalten alles was im Turm verbaut wurde. Die gelieferten Teile habe ich allesamt komplett ausgebaut. | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
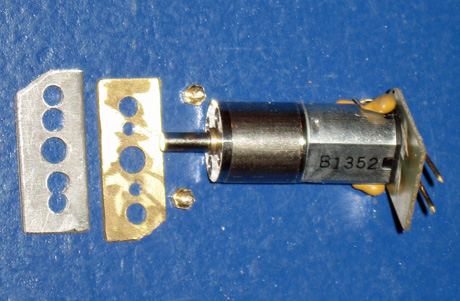
19. Getriebemotor 1 (3Volt / 60 U-Min) Fliesenboden zu langsam, im Gelände kein Test |
20. Getriebemotor 2 (3Volt / 100 U-Min) Fliesenboden zu langsam, im Gelände kein Test |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
21. Getriebemotor 3 (3Volt / 245 U-Min) Fliesenboden ok, im Gelände bewegt sich selbstständig. |
22. Getriebemotor 4 (6Volt / 60 U-Min) Fliesenboden zu langsam, im Gelände stabil. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
23. Getriebemotor 5 (6Volt / 100 U-Min) Fliesenboden zu langsam, im Gelände stabil. |
24. Getriebemotor 6 (6Volt / 260 U-Min) Fliesenboden ok, im Gelände bewegt sich leicht |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
25. Getriebemotor 7 (6Volt / 150 U-Min) Fliesenboden etwas zu langsam, im Gelände stabil |
26. Getriebemotor 7 (6Volt / 150 U-Min) der Richtige Bei Fliesenboden nur 70% Gas (Gas-2), im Gelände stabil |
|||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
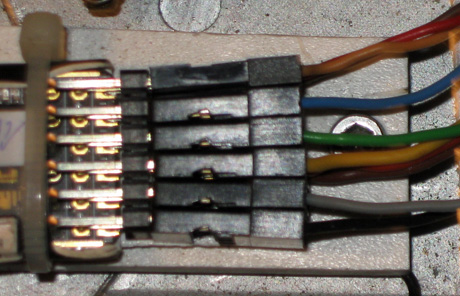
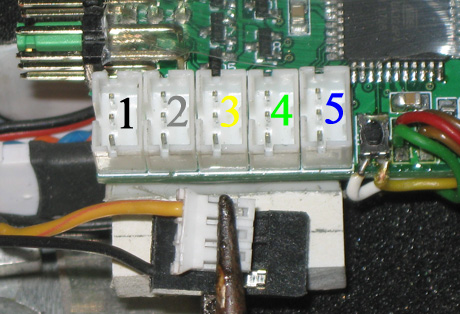
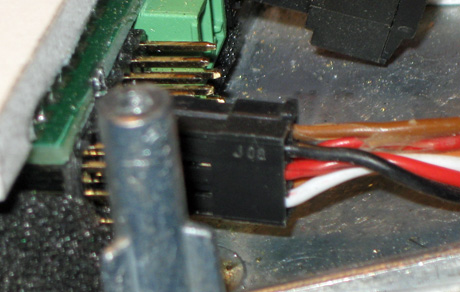
27. Die JR-Stecker im Empfänger, Kanal 1 ist unten. |
28. Die Steuerleitung von Kanal 1 ist im Empfänger schwarz. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
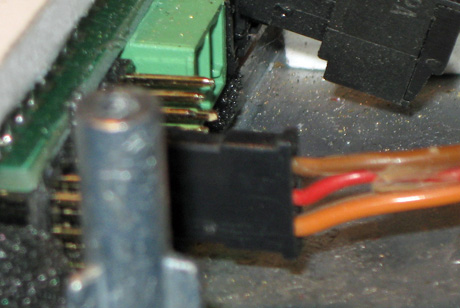
| 29. Die Steuerleitung von Kanal 2 ist im Empfänger grau. |
30. Von Kanal 3 werden alle drei Leitungen benötigt. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
| 31. Die Steuerleitung von Kanal 4 ist im Empfänger grün. |
32. Die Steuerleitung von Kanal 5 ist im Empfänger blau. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
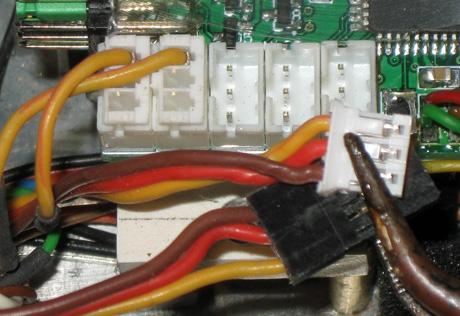
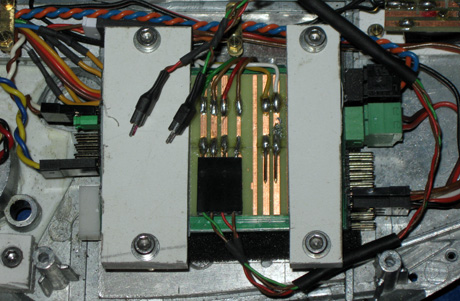
| 33. Das Servokabel von der Rohrwiege (heben & senken). |
34. Das Servokabel vom Rohrrückzug (RRZ). |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
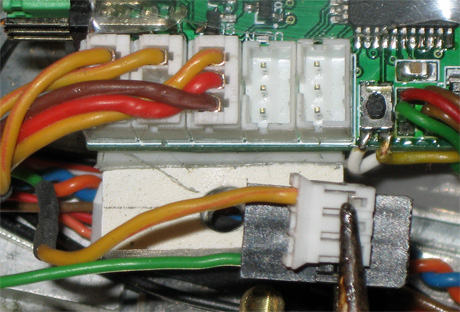
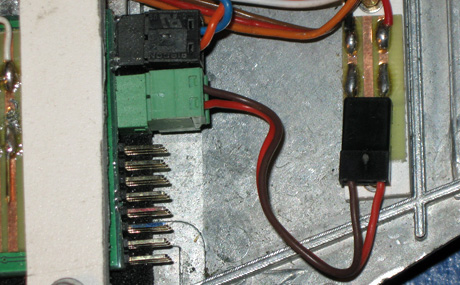
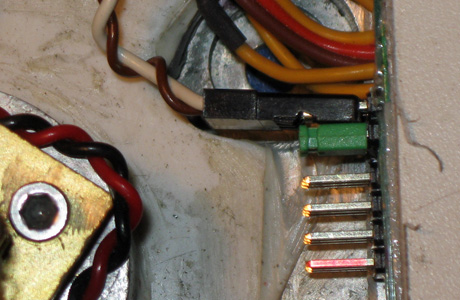
| 35. Der Akku hat eine Schnittstelle für die Ausführung ohne Modul. |
36. Der gelb-blaue Stecker ist die Blitz-LED. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
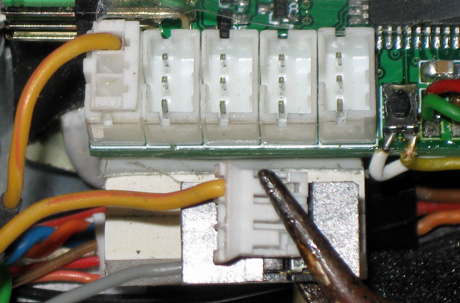
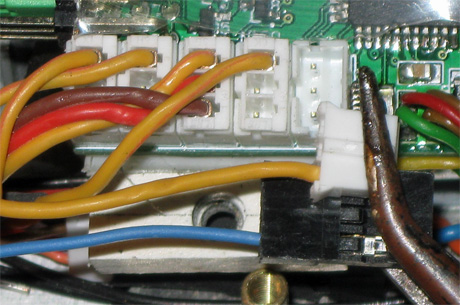
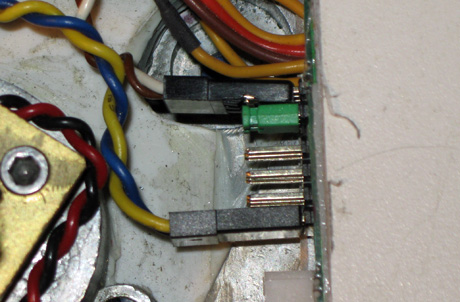
| 37. Die belegten Stecklätze der linken Anschlußseite |
38. Der weiß-braune Stecker ist der Heckabweiser. |
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||
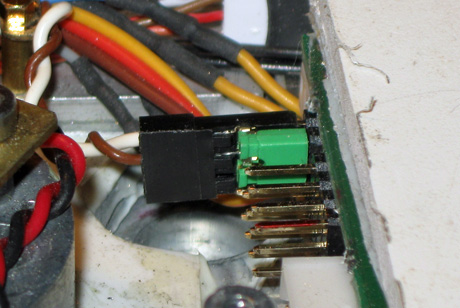
| 39. Die grüne Brücke ist der Autolader. |
40. Oben rechts der schwarze Stecker vom Turmmotor (blau/braun). |
|||||||||||||||||||||||||||||||||||||||||||||||||
| nach oben | ||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
| 41. Der Plan ist als als Draufsicht gezeichnet, also wenn man die Turmdecke dreht und vor sich legt. | als PDF | |||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||
| 42. Die Steckplatzbelegung der Waffenstabilisierung vom SGS Modul TVC-GSU-12. | nach oben | |||||||||||||||||||||||||||||||||||||||||||||||||
| zur Übersicht 1:16 | ||||||||||||||||||||||||||||||||||||||||||||||||||